martes, 15 de junio de 2010
domingo, 14 de septiembre de 2008
CONFIGURACION DEL SERVIDOR Y PASOS PARA CONEXION REMOTA
1.- Abrir el programa cliente, correrlo, igresar #ip del servidor y activar

2- Abrir programa servidor en: tools-options- web server configuration

3.- despues sereccionar en las mismas opciones web server browser access

Aquí debemos de anotar nuestro numero ip del servidor asi como el numero ip de la de la computadora cliente, para que tenga derecho a ver y controlar desde un lugar remoto (allow viewing and controlling).
4.- A continuación debemos de ir a web server: visible VIS.

Aquí debemos de pone los vis, para que tengan acceso los clientes al momento que se conecten (serrvidorjoy.vi).
5.- Después en options, seleccionamos web publishing.

Aquí seleccionamos embedded en viewing options y guardamos.
6.- Después nos va a salir la pagina que es la que va anotar el cliente en el browser de su explorador.

7.- Ahora el cliente tiene que anotar esa pagina que genero el servidor.
8.- Pantalla final del servidor.

martes, 9 de septiembre de 2008
CONTROL CLIENTE Y CONTROL SERVIDOR
Debido a que estamos utilizando un joystick en el programa, es necesario crear un programa cliente y servidor para que pueda transmitir datos al momento de tomar el mando con el cliente y el servidor pueda responder a las peticiones enviadas. Para esto vamos a utilizar el protocolo UDP.
PROTOCOLO UDP
UDP son las siglas de Protocolo de Datagrama de Usuario (en inglés User Datagram Protocol) un protocolo sin conexión que, como TCP, funciona en redes IP.
UDP/IP proporciona muy pocos servicios de recuperación de errores, ofreciendo en su lugar una manera directa de enviar y recibir datagramas a través una red IP. Se utiliza sobre todo cuando la velocidad es un factor importante en la transmisión de la información, por ejemplo, Real Audio utiliza el UDP.

domingo, 22 de junio de 2008
CONTROL DE MANDO REMOTO VIA WEB
Ahora que ya solo falta armar el diseño y que hemos concluido el programa, se pretende tomar el control de mando via web, ya que labview nos brinda este tipo de aplicaciones.
Lo que se hará es implementar el programa realizado y se adaptara para que pueda funcionar en web y de esta manera poder manipular nuestro nxt desde cualquier pc con conexion a internet y para esto utilizaremos el labview internet toookit 6.0.

Posteriormente ire poniendo información y detalles sobre este avance.
Lo que se hará es implementar el programa realizado y se adaptara para que pueda funcionar en web y de esta manera poder manipular nuestro nxt desde cualquier pc con conexion a internet y para esto utilizaremos el labview internet toookit 6.0.

Posteriormente ire poniendo información y detalles sobre este avance.
sábado, 21 de junio de 2008
MODIFICACION, Y PRUEBA # 2
Se tuvo que realizar una serie de modificaciones ya que en el programa, tenia un conflicto con respecto al arranque de los motores que no respondian al jostick , y tambien a la velocidad de respuesta usando bluetooth como medio de comunicación esto se debia a que se esta usando el Ivision toolkit 1.8 demo, dado que es un demo , tiene sus limitantes y al arrancar el programa el codigo realizado para la camara abarca todo el proceso y bloquea los demas, esto se soluciono poniendo todo el codigo adentro del case de la camara.
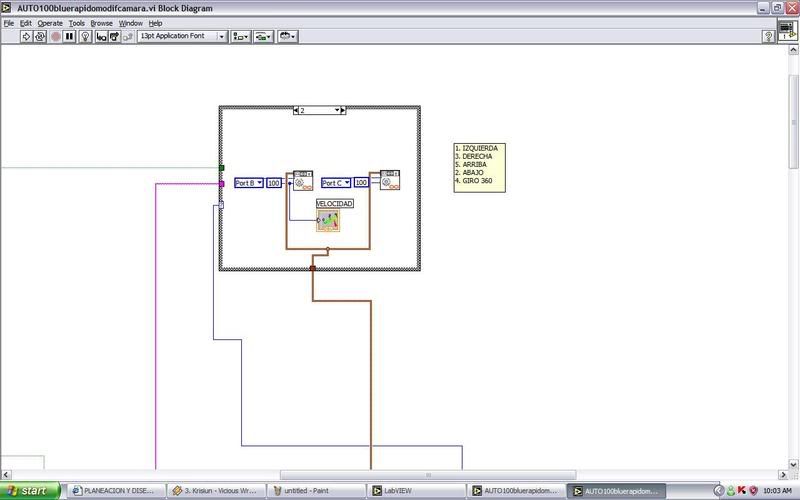
A continuación tenemos imagenes de las modificaciones que se hicieron.
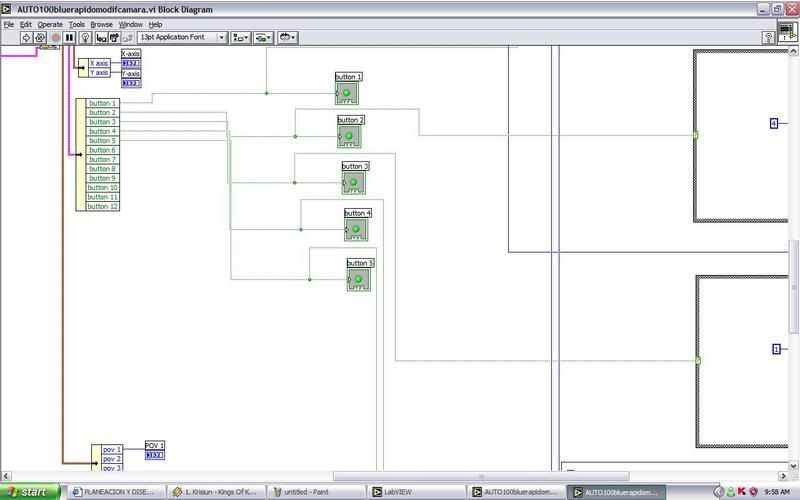
IMG. 1
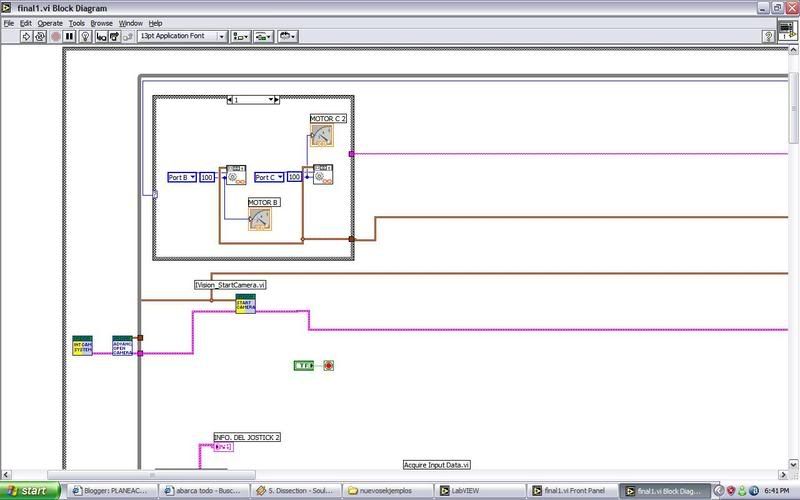
Aqui podemos observar parte del codigo de los motores y la camara.
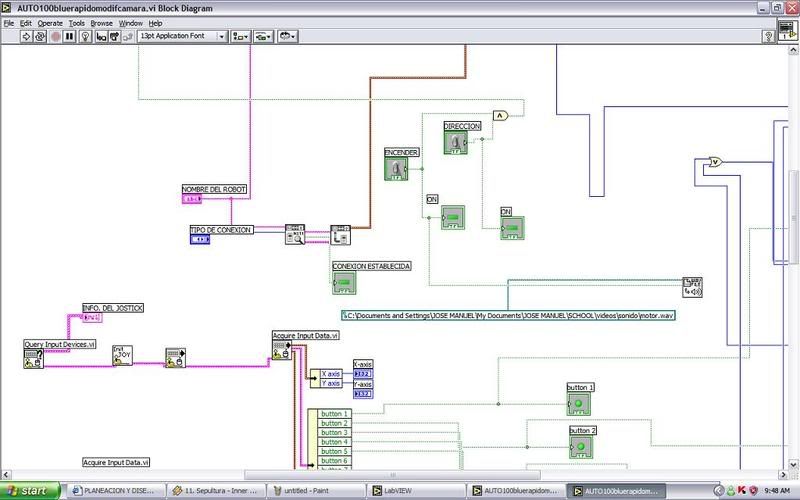
IMG. 2
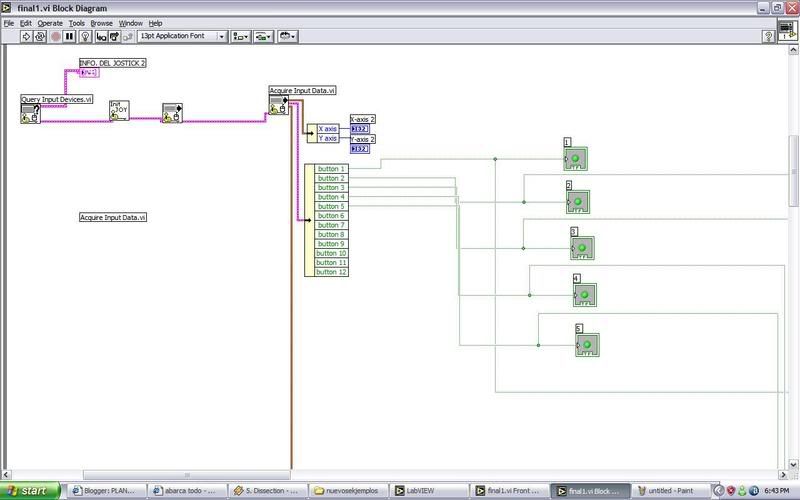
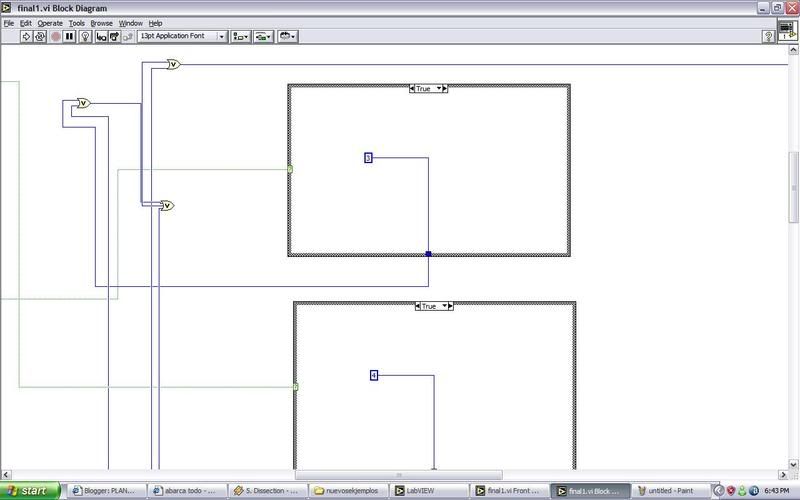
Aqui parte del codigo para el joystick.
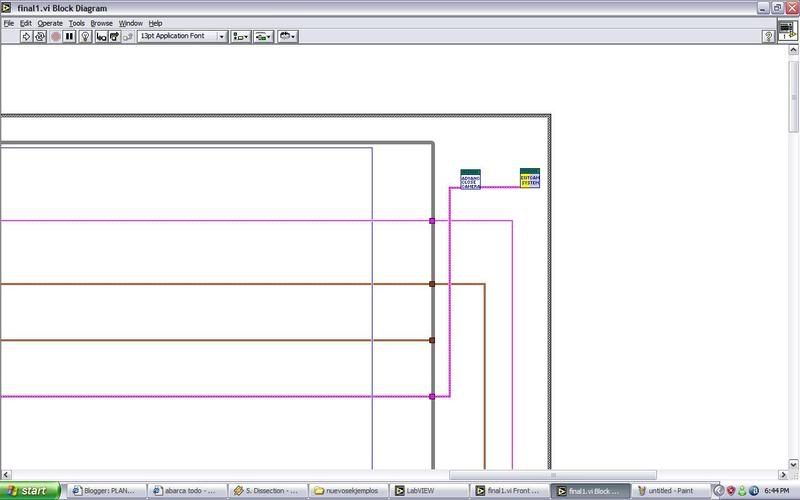
IMG. 3
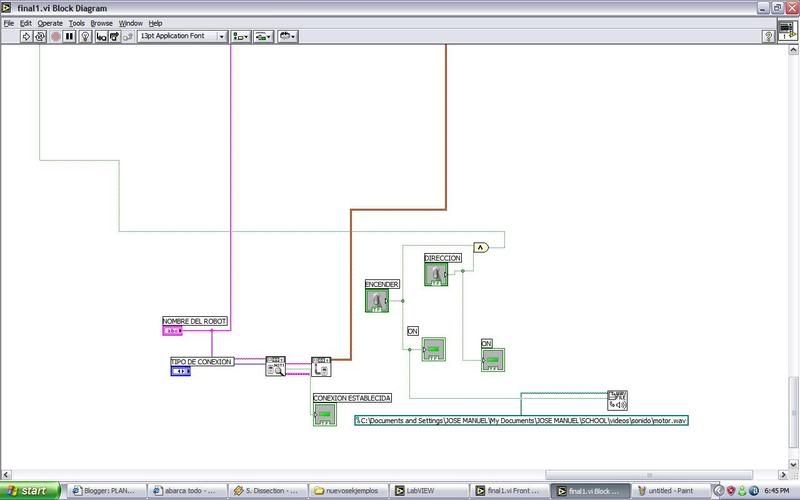
Aqui se observa el codigo donde indica el nombre del robot, tipo de conexión, el encendido y la dirección.
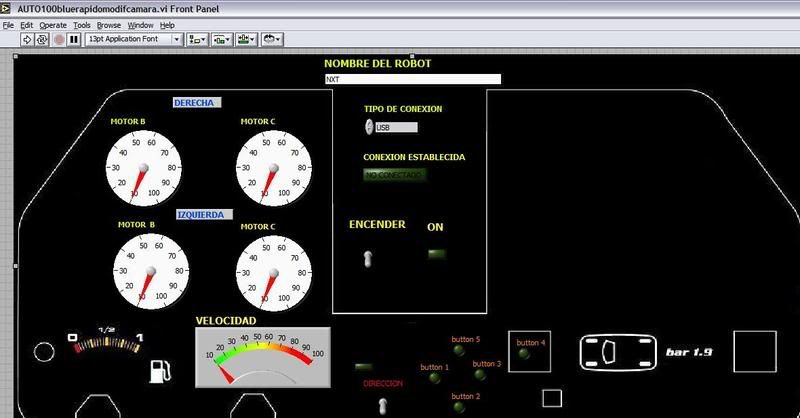
IMG. 4

Aqui se observa las modificaciones al panel frontal
VIDEO NUM. 2
En este video se observa la interface de potencia , el motor de 12v y la pila que estan conectadas a esta, y la interface conectada al controlador nxt.
En esta prueba se realizara por medio de bluetooth seleccionando el tipo de en el panel frontal.
Al minuto 1:06 se puede observar que se enciende un foco en el panel frontal indicandonos "conectado" esto indica que se realizo la conexion satisfactoriamente, posteriormente presionamos el boton encender y dirección.
Al minuto 1:44 en el video aparece un mensaje en el cual no se alcanza a distinnguir muy bien debiudo a la calidad de video seria este mensaje.

El cual nos pregunta si queremos correr el demo del ivsion toolkit demo 1.8 presionamos que si.
En el minuto 2:00 se observa el joystick que a sido configurado especialmente para este programa, ya que se configuro conforme a los numeros de los botones del joystick, y que estos aparecen en el panel frontal ( IMG. 4) 1=izq 2=abjo 3=derecha 5=enfrente 4=giro 360 grados(camara).

Y posteriormente podemos observar la respuesta del motor al ejecutar los movimientos del joystick.
Ahora solo falta montar el diseño de la estructura, utilizando la base, y las llantas y lo que se ocupe.
Posteriormente subiré un video con mejor calidad.
A continuación tenemos imagenes de las modificaciones que se hicieron.
IMG. 1


Aqui podemos observar parte del codigo de los motores y la camara.
IMG. 2


Aqui parte del codigo para el joystick.
IMG. 3

Aqui se observa el codigo donde indica el nombre del robot, tipo de conexión, el encendido y la dirección.
IMG. 4

Aqui se observa las modificaciones al panel frontal
VIDEO NUM. 2
En este video se observa la interface de potencia , el motor de 12v y la pila que estan conectadas a esta, y la interface conectada al controlador nxt.
En esta prueba se realizara por medio de bluetooth seleccionando el tipo de en el panel frontal.
Al minuto 1:06 se puede observar que se enciende un foco en el panel frontal indicandonos "conectado" esto indica que se realizo la conexion satisfactoriamente, posteriormente presionamos el boton encender y dirección.
Al minuto 1:44 en el video aparece un mensaje en el cual no se alcanza a distinnguir muy bien debiudo a la calidad de video seria este mensaje.

El cual nos pregunta si queremos correr el demo del ivsion toolkit demo 1.8 presionamos que si.
En el minuto 2:00 se observa el joystick que a sido configurado especialmente para este programa, ya que se configuro conforme a los numeros de los botones del joystick, y que estos aparecen en el panel frontal ( IMG. 4) 1=izq 2=abjo 3=derecha 5=enfrente 4=giro 360 grados(camara).

Y posteriormente podemos observar la respuesta del motor al ejecutar los movimientos del joystick.
Ahora solo falta montar el diseño de la estructura, utilizando la base, y las llantas y lo que se ocupe.
Posteriormente subiré un video con mejor calidad.
viernes, 6 de junio de 2008
CODIGO, PANTALLAS Y PRUEBA NUM.1
A continuación se puede ver la pantalla del panel principal del programa, los velocimetros , el nombre del robot, el tipo de conexión (usb o bluetooth), botón de encendido y dirección.
Aqui podemos ver parte del código, asi como unas herramientas que se tuvieron que bajar como el toolkit de labview para lego mindstorms nxt.
Aqui se observa la configuracion de los botones del joystick.
Aqui tenemos como se configuraron los botones para mover los motores y la descripción que corresponde a los botones del joystick previamente asignados.
Y por ultimo tenemos un video donde se pone a prueba el programa.
\

Aqui podemos ver parte del código, asi como unas herramientas que se tuvieron que bajar como el toolkit de labview para lego mindstorms nxt.

Aqui se observa la configuracion de los botones del joystick.

Aqui tenemos como se configuraron los botones para mover los motores y la descripción que corresponde a los botones del joystick previamente asignados.

Y por ultimo tenemos un video donde se pone a prueba el programa.
\
miércoles, 4 de junio de 2008
EQUIPO OBTENIDO
Parte del equipo obtenido que a continuación se muestra es gracias a nuestros patrocinadores excepto el joystick, motores , la pastilla bluetooth, bateria, base, llantas y alambres.
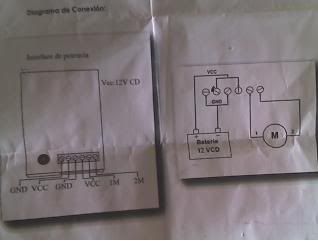
Interfaces de Potencia
caracteristicas:
12 volts de corriente continua
10 amperes maximo
15 a 40 grados centigrados temperatura de operación


Controlador Lego Mindstorm Nxt con 2 servo motores
Es posible que la camara lego se monte en un servo motor para obtener una panoramica de 360 grados para mayor comodidad

Pastilla Bluetooth
Para obtener una conexión inalámbrica

Webcam Lego

3 motores de 12 volts
Estos motores tienen la caracteristica que son de un torque aprox de 3 a 8 kg/cm2


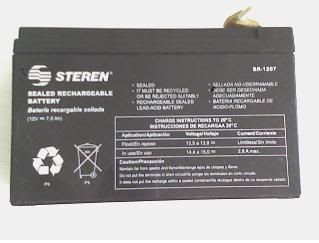
Bateria de 12 volts = 7,0 ah
Joystick

Partes: Base y llantas

Interfaces de Potencia
caracteristicas:
12 volts de corriente continua
10 amperes maximo
15 a 40 grados centigrados temperatura de operación



Controlador Lego Mindstorm Nxt con 2 servo motores
Es posible que la camara lego se monte en un servo motor para obtener una panoramica de 360 grados para mayor comodidad

Pastilla Bluetooth
Para obtener una conexión inalámbrica

Webcam Lego

3 motores de 12 volts
Estos motores tienen la caracteristica que son de un torque aprox de 3 a 8 kg/cm2


Bateria de 12 volts = 7,0 ah

Joystick

Partes: Base y llantas

Suscribirse a:
Entradas (Atom)



