Se tuvo que realizar una serie de modificaciones ya que en el programa, tenia un conflicto con respecto al arranque de los motores que no respondian al jostick , y tambien a la velocidad de respuesta usando bluetooth como medio de comunicación esto se debia a que se esta usando el Ivision toolkit 1.8 demo, dado que es un demo , tiene sus limitantes y al arrancar el programa el codigo realizado para la camara abarca todo el proceso y bloquea los demas, esto se soluciono poniendo todo el codigo adentro del case de la camara.
A continuación tenemos imagenes de las modificaciones que se hicieron.
IMG. 1
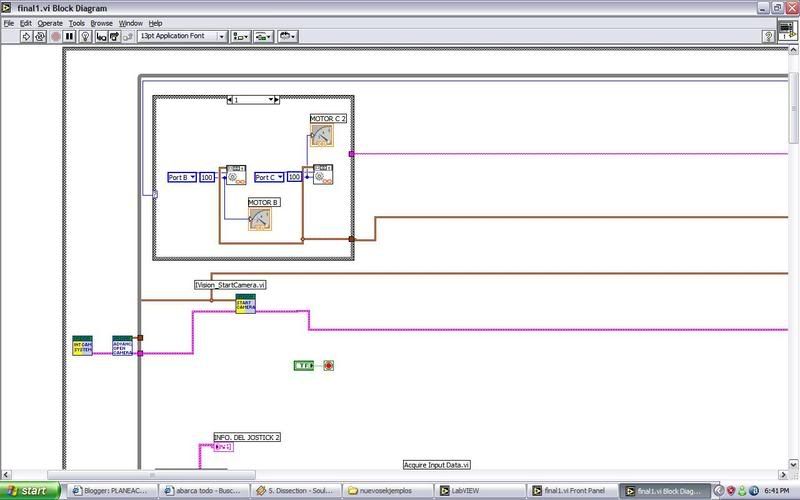
Aqui podemos observar parte del codigo de los motores y la camara.
IMG. 2
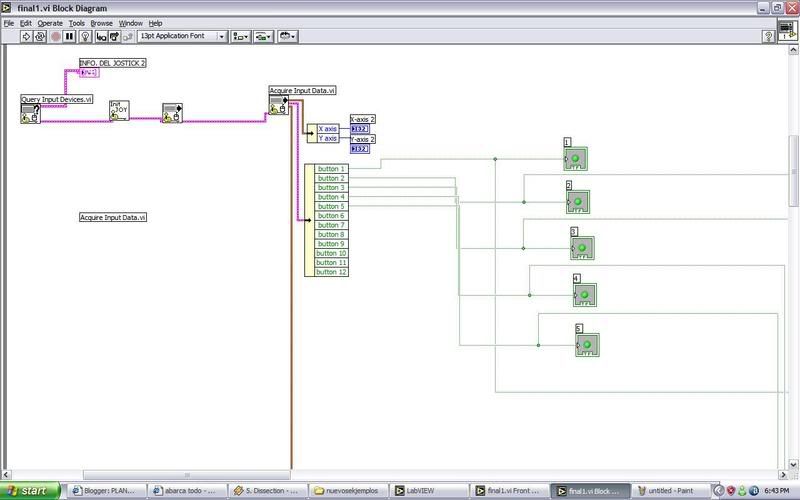
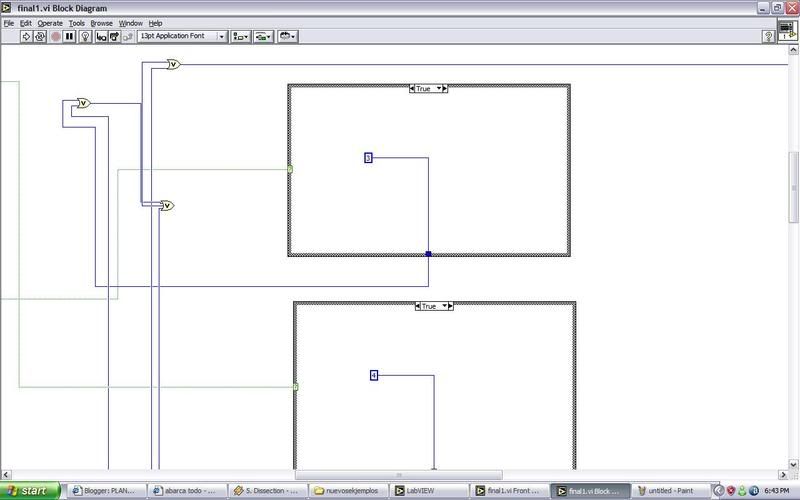
Aqui parte del codigo para el joystick.
IMG. 3
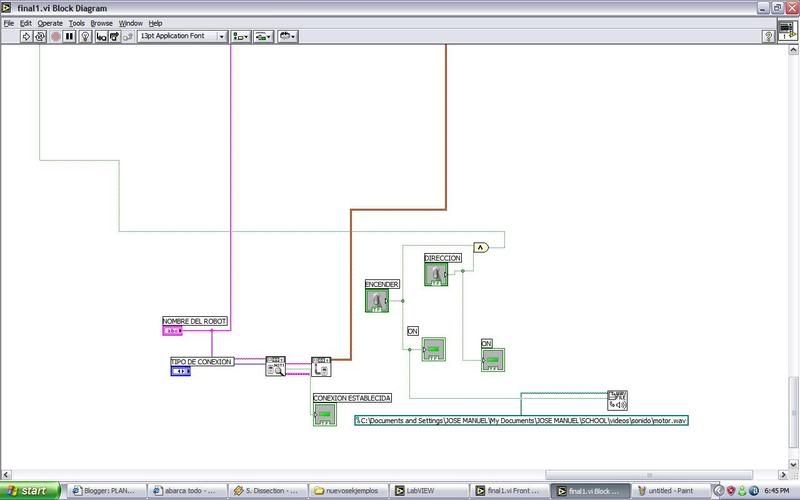
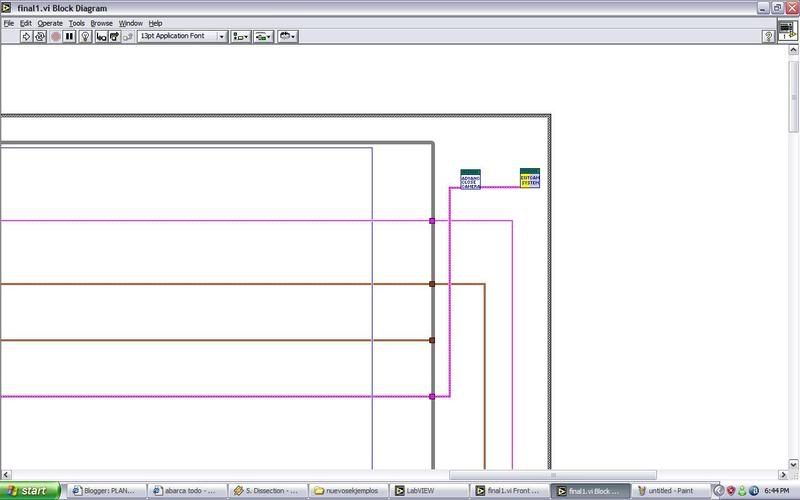
Aqui se observa el codigo donde indica el nombre del robot, tipo de conexión, el encendido y la dirección.
IMG. 4

Aqui se observa las modificaciones al panel frontal
VIDEO NUM. 2
En este video se observa la interface de potencia , el motor de 12v y la pila que estan conectadas a esta, y la interface conectada al controlador nxt.
En esta prueba se realizara por medio de bluetooth seleccionando el tipo de en el panel frontal.
Al minuto 1:06 se puede observar que se enciende un foco en el panel frontal indicandonos "conectado" esto indica que se realizo la conexion satisfactoriamente, posteriormente presionamos el boton encender y dirección.
Al minuto 1:44 en el video aparece un mensaje en el cual no se alcanza a distinnguir muy bien debiudo a la calidad de video seria este mensaje.

El cual nos pregunta si queremos correr el demo del ivsion toolkit demo 1.8 presionamos que si.
En el minuto 2:00 se observa el joystick que a sido configurado especialmente para este programa, ya que se configuro conforme a los numeros de los botones del joystick, y que estos aparecen en el panel frontal ( IMG. 4)
1=izq 2=abjo 3=derecha 5=enfrente 4=giro 360 grados(camara).
Y posteriormente podemos observar la respuesta del motor al ejecutar los movimientos del joystick.
Ahora solo falta montar el diseño de la estructura, utilizando la base, y las llantas y lo que se ocupe.
Posteriormente subiré un video con mejor calidad.



























